Ein Roboterarm, den man mit einem 3D-gedruckten Handschuh steuern kann – das klingt mehr wie aus einem Science-Fiction-Film als wie ein Schulprojekt. Wie seid ihr auf diese Idee gekommen?
Sebastian: Ich glaube, die Ideenfindung ist wesentlich unspektakulärer, als man sich das vorstellt. Unser Abteilungsvorstand hat uns erzählt, dass er einen neuen Schwerpunkt machen möchte – autonome Robotik. Und er hat uns darum gebeten, dazu ein Projekt zu machen. Wir haben uns dann gedacht: Was ist das Coolste, was wir uns vorstellen und auch realisieren können? Dazu haben wir ein bisschen gebrainstormt und der Roboterarm war einfach das Coolste, was uns eingefallen ist.
Ein generelles Interesse für die Robotik war also bei euch allen schon da. Woher kommt die Faszination für dieses Gebiet?
Jakob: Mich hat das generell schon sehr lange interessiert. Das war eigentlich der Grund, warum ich in die HTL gegangen bin – weil mich Robotik begeistert. Dass es so ein breiter Bereich ist, wo man ein System aus extrem vielen verschiedenen Komponenten macht, die dann alle zusammenspielen müssen, damit es funktioniert.
Thomas: Es ist einfach ein sehr spannender Bereich in der Technik – vielleicht auch deswegen, weil es eine Anwendung hat, die man selbst gleich sehen kann.
Jakob: Genau, es ist etwas sehr Greifbares. Bei vielen anderen technischen Projekten, zum Beispiel wenn man eine Ladungsregelung baut, sieht man den Erfolg nicht so direkt. Aber hier bewegt sich etwas, man kann es sich direkt anschauen, und wenn der Roboter fertig ist und das macht, was man will, dann ist das schon ein ziemliches Erfolgsgefühl.
Sebastian: Darum ist unser Projekt auch für Laien spektakulär. Und das war die Grundidee – dass wir ein Projekt machen, dass auch für jemanden interessant ist, der nicht vom Fach ist. Denn natürlich kann ich etwas entwickeln, was für einen Techniker superinteressant ist, aber wo sich ein Laie dann denkt: Was ist das überhaupt? Keine Ahnung, was das da macht.

Das stimmt, bei eurem Projekt sieht man gleich, worum es geht. Aber wie funktioniert die Roboterhand nun genau? Was ist das Prinzip dahinter?
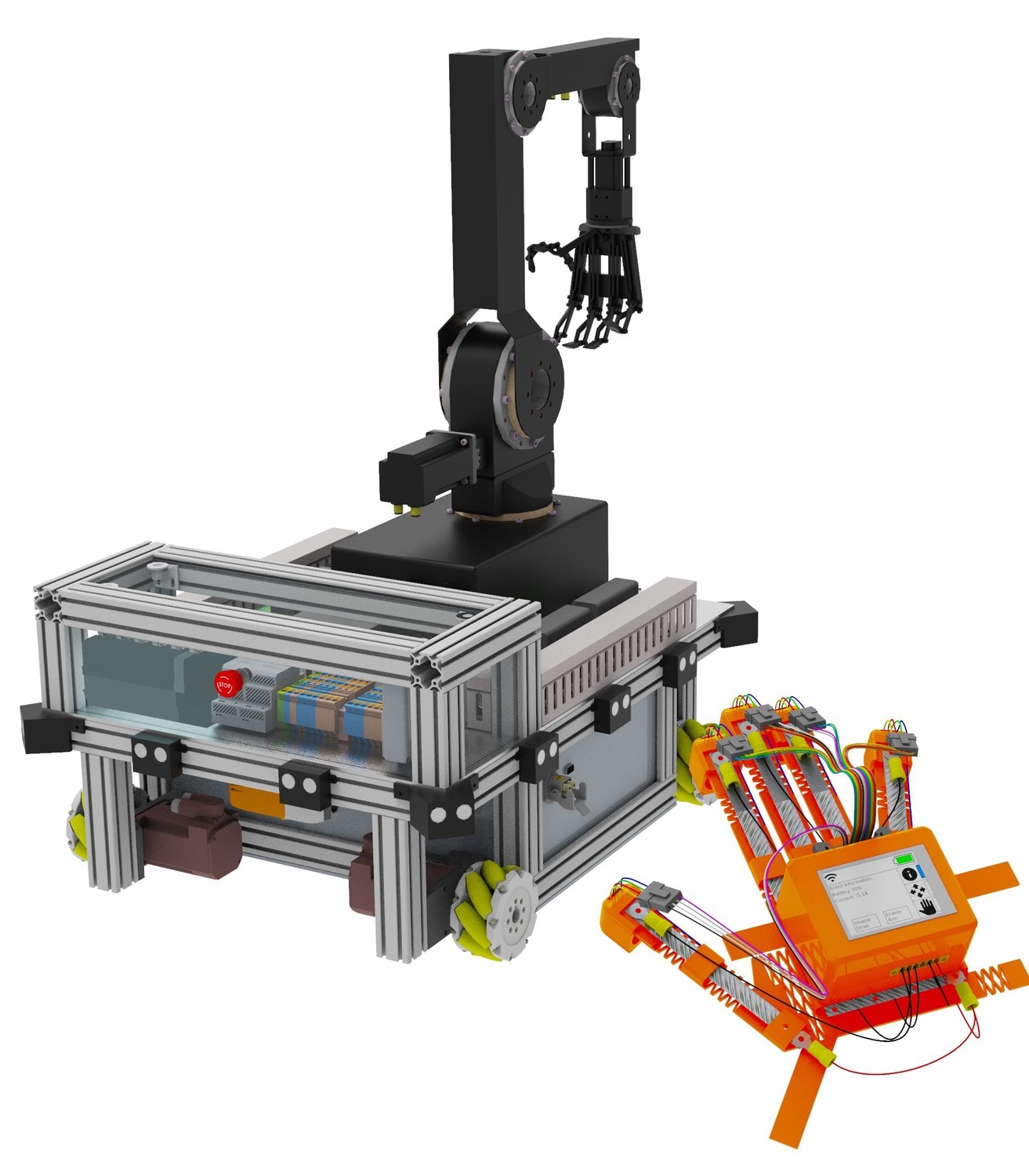
Moritz: Wir haben diesen Fernsteuerhandschuh, der praktisch das Bediengerät ist, mit dem der Roboter gesteuert wird. Da gibt es verschiedene Bedienmodi – zum einen ist da das Fahrgestell, also die Räder des Roboters, und zum anderen der Roboter an sich. Die Steuerung über den Handschuh erfolgt grundsätzlich durch Gesten, durch Neigung – wenn man zum Beispiel beim Fahrgestell die Hand neigt, fährt der Roboter in die entsprechende Richtung. Das gleiche Prinzip gilt beim Roboterarm: Wenn man die eigene Hand neigt, fährt der Roboterarm in die entsprechende Richtung.
Und wie sieht es auf technischer Ebene aus?
Jakob: Im Handschuh ist ein Lagesensor – wie zum Beispiel im Handy, da sind auch solche Sensoren verbaut, die den Bildschirm drehen, wenn man das Handy neigt. Dieser Lagesensor misst die Neigung der Hand und sendet dann über Bluetooth die Bewegung als Befehle an den Roboter, sodass er weiß, wie er sich bewegen soll.
Zusätzlich haben wir in jedem Finger einen Sensor, der den Winkel der einzelnen Finger misst. Diese Information wird dann auch noch übertragen und steuert die einzelnen Finger der Roboterhand.
Wer uns da einfällt? Roboter Trudi von der FH Kärnten! Trudi wird zwar ein bisschen anders gesteuert. Und sieht auch anders aus. Aber ist ebenso spannend zu beobachten – sieh selbst!
Ein sehr komplexes Projekt, bei dem ihr viel bedenken musstet. Wie seid ihr an die Umsetzung gegangen? Hat die Arbeitsteilung gut funktioniert?
Thomas: Wir haben schon öfter zusammengearbeitet und sind das gewohnt, dass man sich untereinander abstimmt – man weiß dann schon, wer wo am besten ist. Am Anfang haben wir, wie gesagt, gemeinsam gebrainstormt – was können wir alles einbringen in dieses Projekt? Wie soll die Steuerung ausschauen?
Jakob: Im Prinzip haben wir am Ende der vierten Klasse begonnen, Ideen zu sammeln. Über den Sommer haben wir dann eine grobe Planung gemacht, einmal geschaut, was könnten wir ungefähr für Teile einsetzen, wie könnten wir es realisieren – dazu mussten wir auch planen, was wir bestellen, damit wir alles rechtzeitig bekommen.
Sebastian: Das Budget mussten wir natürlich mit der Schule besprechen.
Thomas: Das dann dreimal oder so gesprengt wurde. (alle lachen)
Das hat sich auf jeden Fall ausgezahlt - als Diplomarbeit habt ihr mit eurem Roboterarm mehrere Preise gewonnen. Wie könnte man ihn nun in der Realität einsetzen?
Sebastian: Das ist zurzeit noch schwierig, weil es wirklich nur ein Prototyp ist. Aber wenn man das Projekt weiterentwickeln möchte – solche Systeme gibt’s zum Beispiel schon bei OPs, wo der Chirurg quasi nicht mehr selbst die Operation durchführt, sondern die Roboterhand. Es gibt auch schon Roboter zur Bombenentschärfung, aber die funktionieren nach einem anderen Prinzip – bei unserer Roboterhand erfolgt die Steuerung direkt über den Bediener.
Thomas: Generell kann man solche Systeme für das Hantieren mit Gefahrstoffen verwenden, die Menschen nicht angreifen sollten – oder wo sie nicht einmal in die Nähe kommen sollten, wie bei radioaktiven Stoffen oder Ähnlichem. Denn so kann der Bediener aus sicherem Abstand steuern und das Schlimmste, was passieren kann ist, dass ein Roboter kaputt ist.
Jakob: Es gibt auch schon Inspektionsroboter, die man einsetzt, wenn man irgendwo nicht hin kann – um Sachen zu reparieren oder zu überprüfen. Aber wie gesagt, derzeit ist es nur ein Prototyp.
Thomas: Es ist einmal eine Veranschaulichung, was man auch mit einem kleinen Budget schon alles auf die Beine stellen kann, so als Schülergruppe.
Sebastian: So ein bisschen als Aufruf für große Firmen, die ein viel größeres Budget haben und unseren Roboter dann schlagen müssen. (alle lachen)
Roboterhand in Action: Für ihr Projekt haben die vier HTL-Schüler auch ein Video gedreht, in dem du dich mit eigenen Augen von der Handschuh-Steuerung überzeugen kannst. (Gedreht wurde es natürlich nicht in der Wüste - das hier ist bloß ein Symbolbild.)
Ihr habt gezeigt, dass man auch als Schüler*in komplexe Ideen umsetzen kann. Was würdet ihr anderen Schüler*innen mitgeben, die sich an so ein Projekt wagen wollen?
Jakob: Zuallererst einmal schauen, wie man den Aufwand einschätzt. Und dann das Doppelte nehmen.
Sebastian: Das Wichtigste ist, dass man sich wirklich etwas sucht, was einen interessiert – man sollte gern dazu bereit sein, mehr dafür zu arbeiten. Oft gibt es an der Schule Beispielprojekte, die nicht zu 100 % überzeugen. Aber wir haben uns wirklich selbst aussuchen können, was mir machen. Und deswegen ist es vielleicht auch so cool geworden. Wenn das an jeder Schule so wäre, dann würde es sicher österreichweit coolere Projekte geben.
Kleine Anmerkung von unserer Seite: Weitere HTLs mit Schwerpunkt Robotik findest du hier!
Thomas: Ja, wir sind da, glaube ich, sehr privilegiert gewesen. Wie schon angesprochen, unser Budget haben wir schon teilweise etwas überzogen. Wir haben generell sehr viel Zeit und Ressourcen für das Projekt bekommen.
Jakob: Coole Projekte brauchen entsprechenden Rückhalt und unsere Abteilung hat unsere innovativen Ideen immer unterstützt. Außerdem wurde uns immer sehr viel Freiraum in der Umsetzung gelassen “Macht’s ein cooles Robotik-Projekt” war die einzige Vorgabe.
Und das ist euch eindeutig gelungen. Danke für das Interview – und alles Gute für die Zukunft! Aber da machen wir uns bei euch keine Sorgen 🙂
Erstmals publiziert wurde dieses Interview am 01.12.2020.